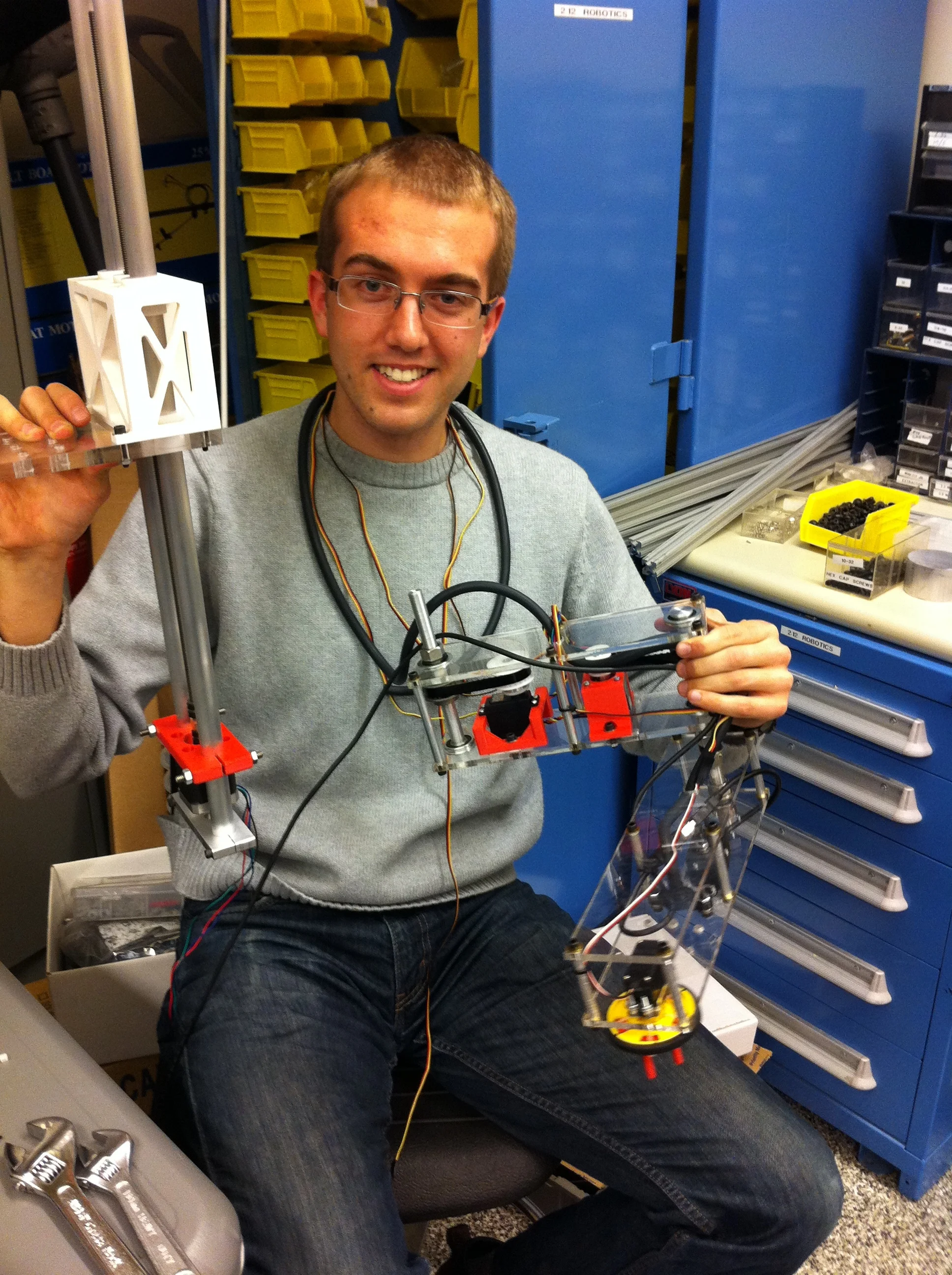
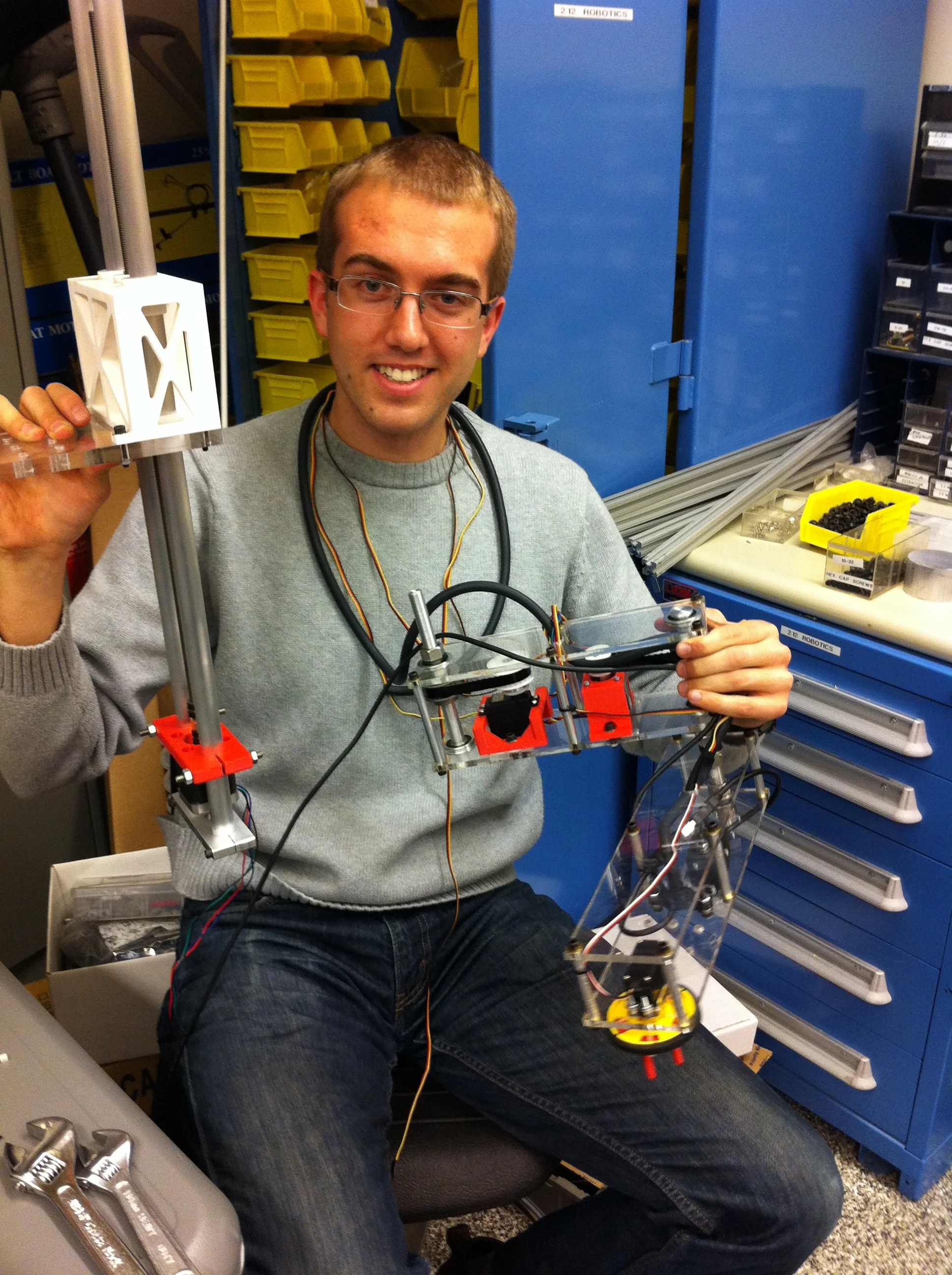
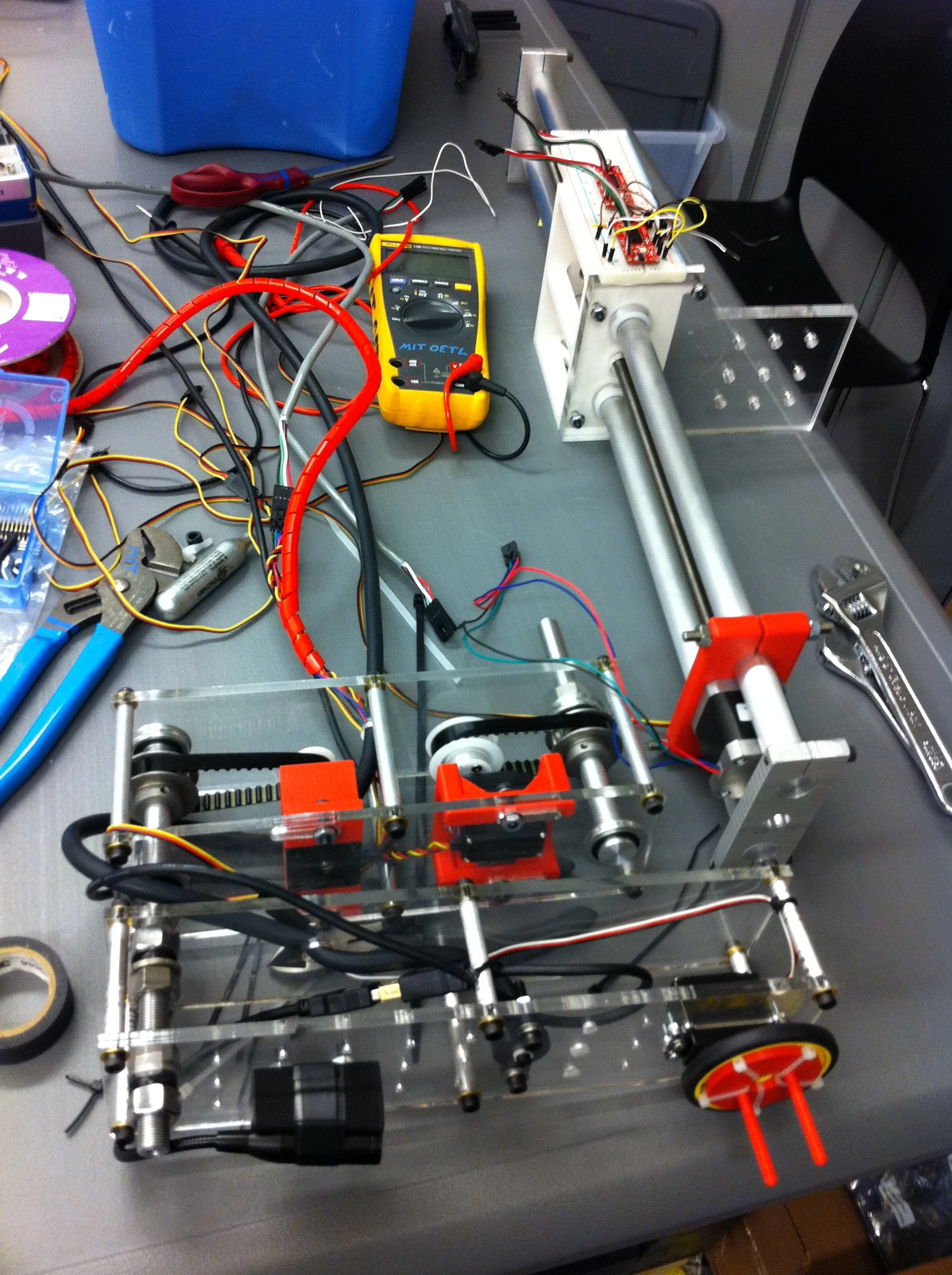
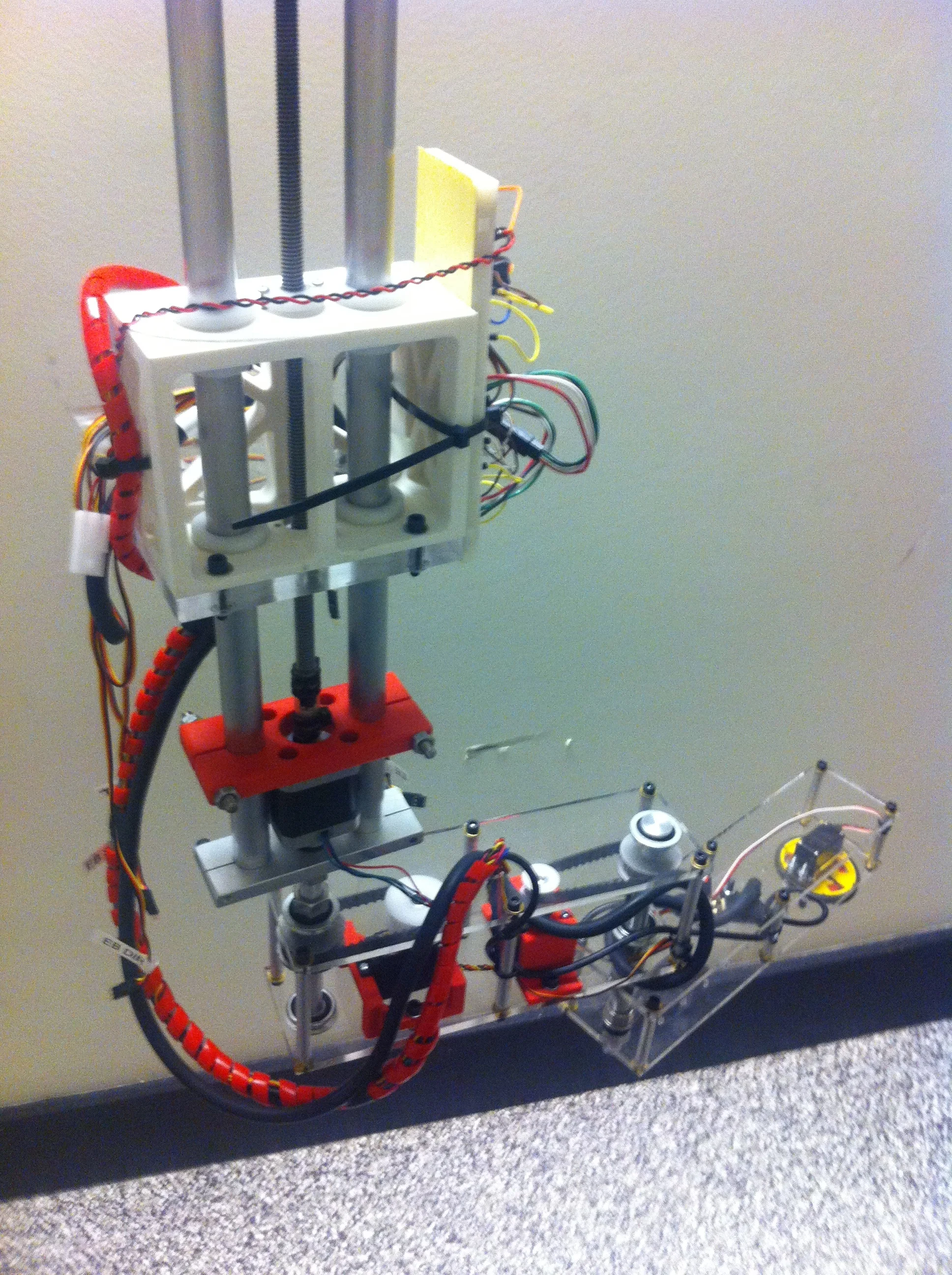
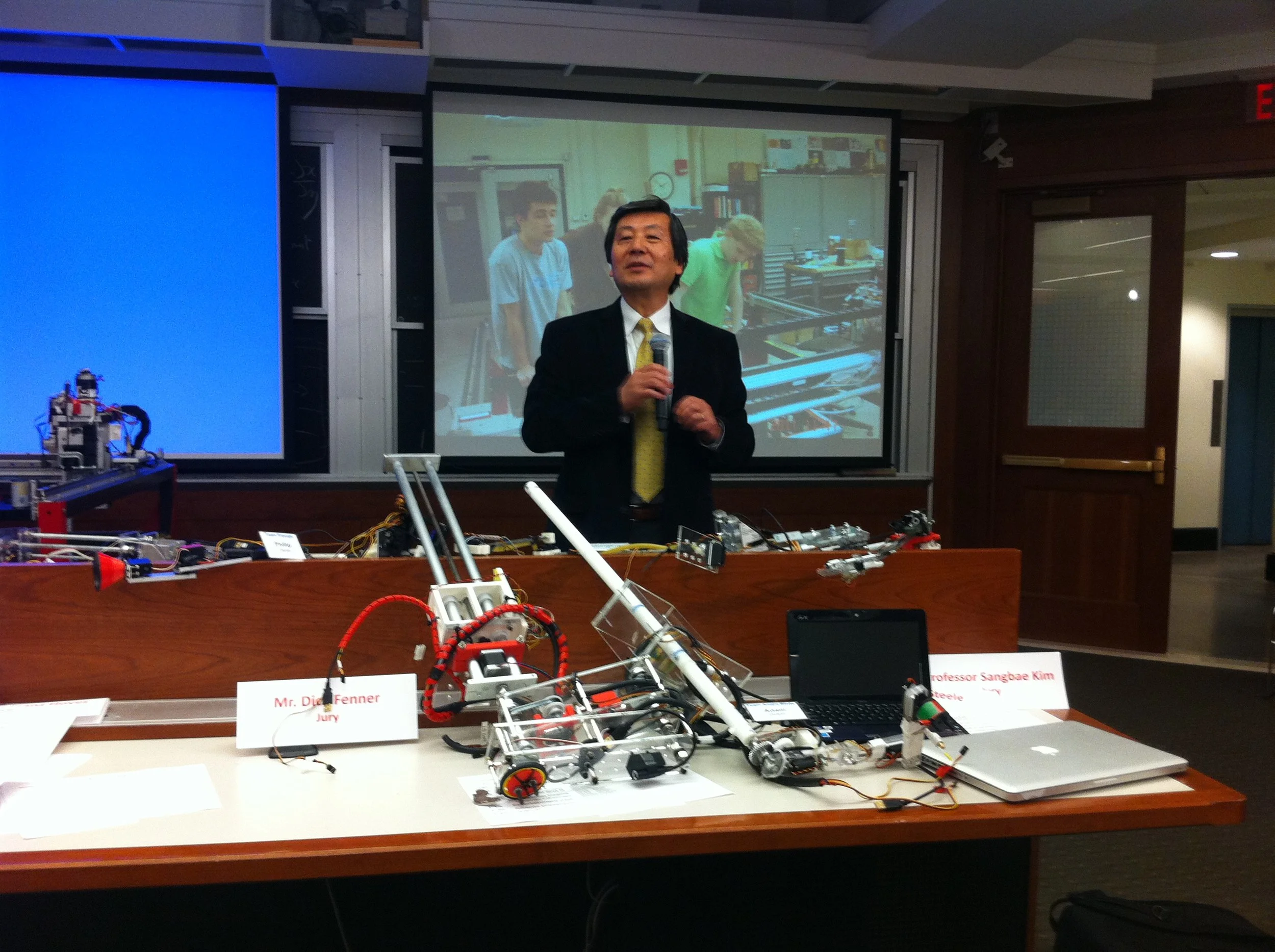

For the MIT 2.12 robotics class I led our team in designing and building our robotic manipulator that particpated in the final competition. I used a long, prismatic actuator to give us plenty of Z travel and two stepper-motor controlled rotary joints to cover the necessary XY plane for the competition goals.
My design was chosen by the panel of robotics faculty at MIT to win the “Best Design Award” for the course