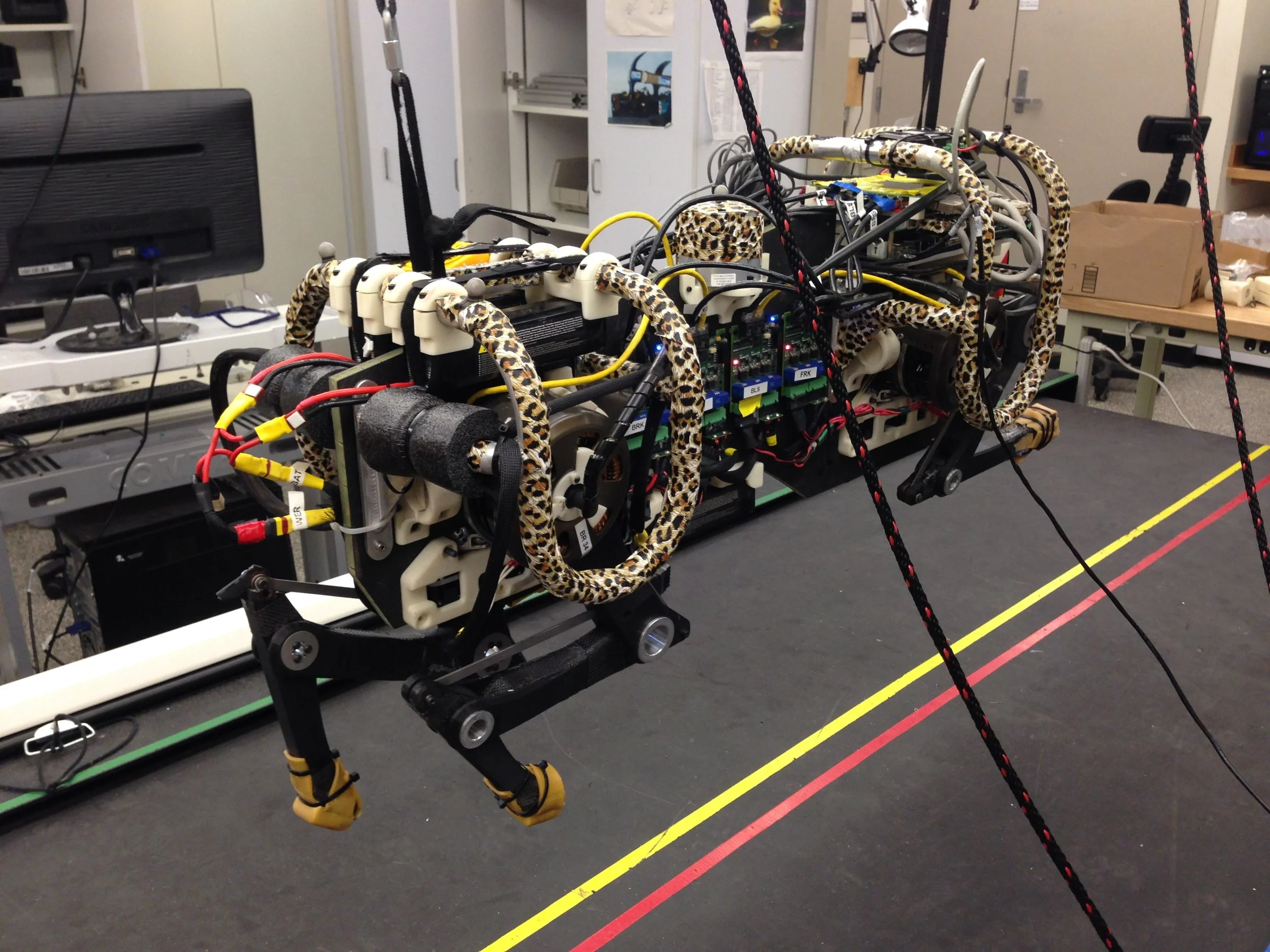
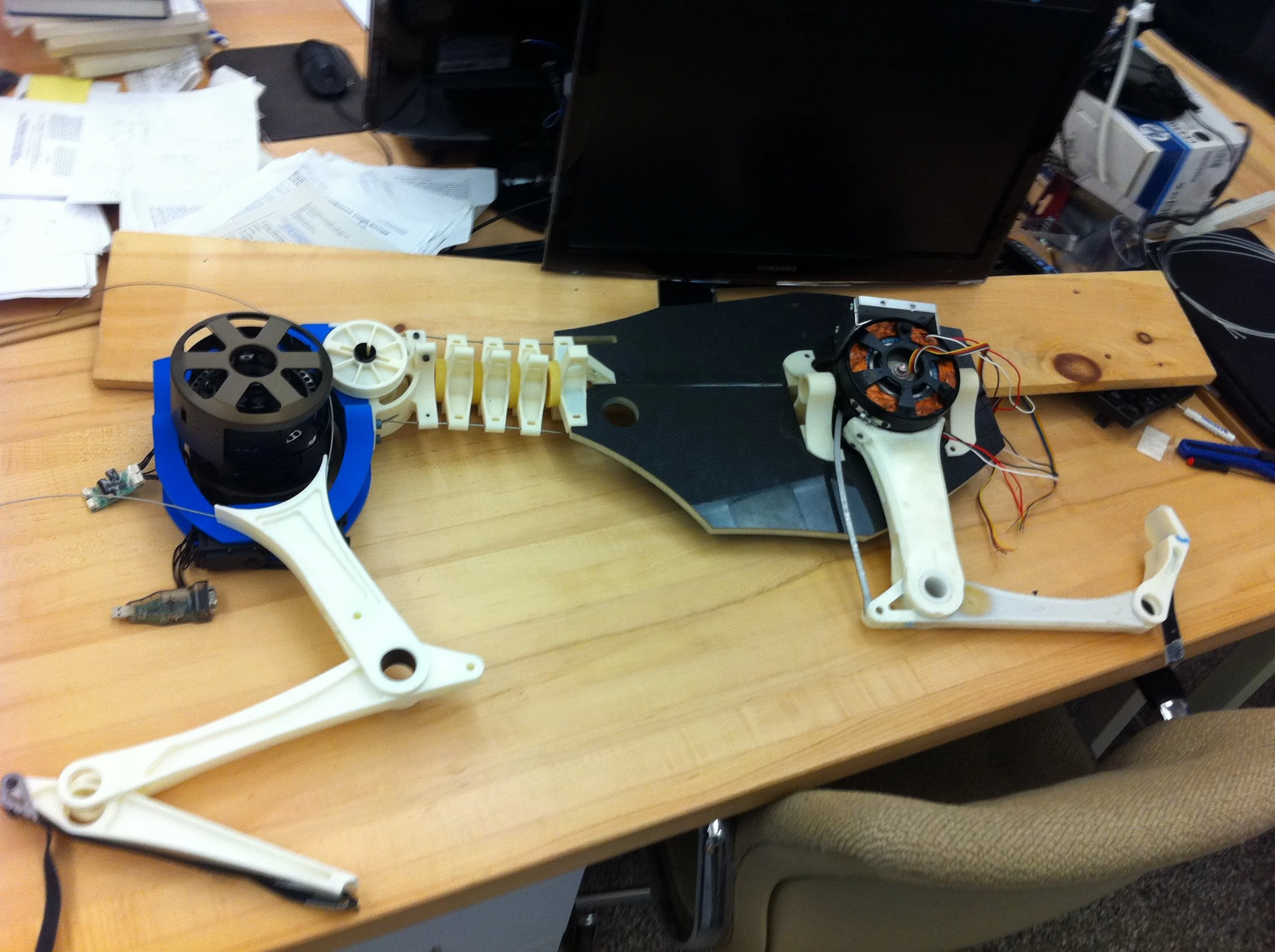
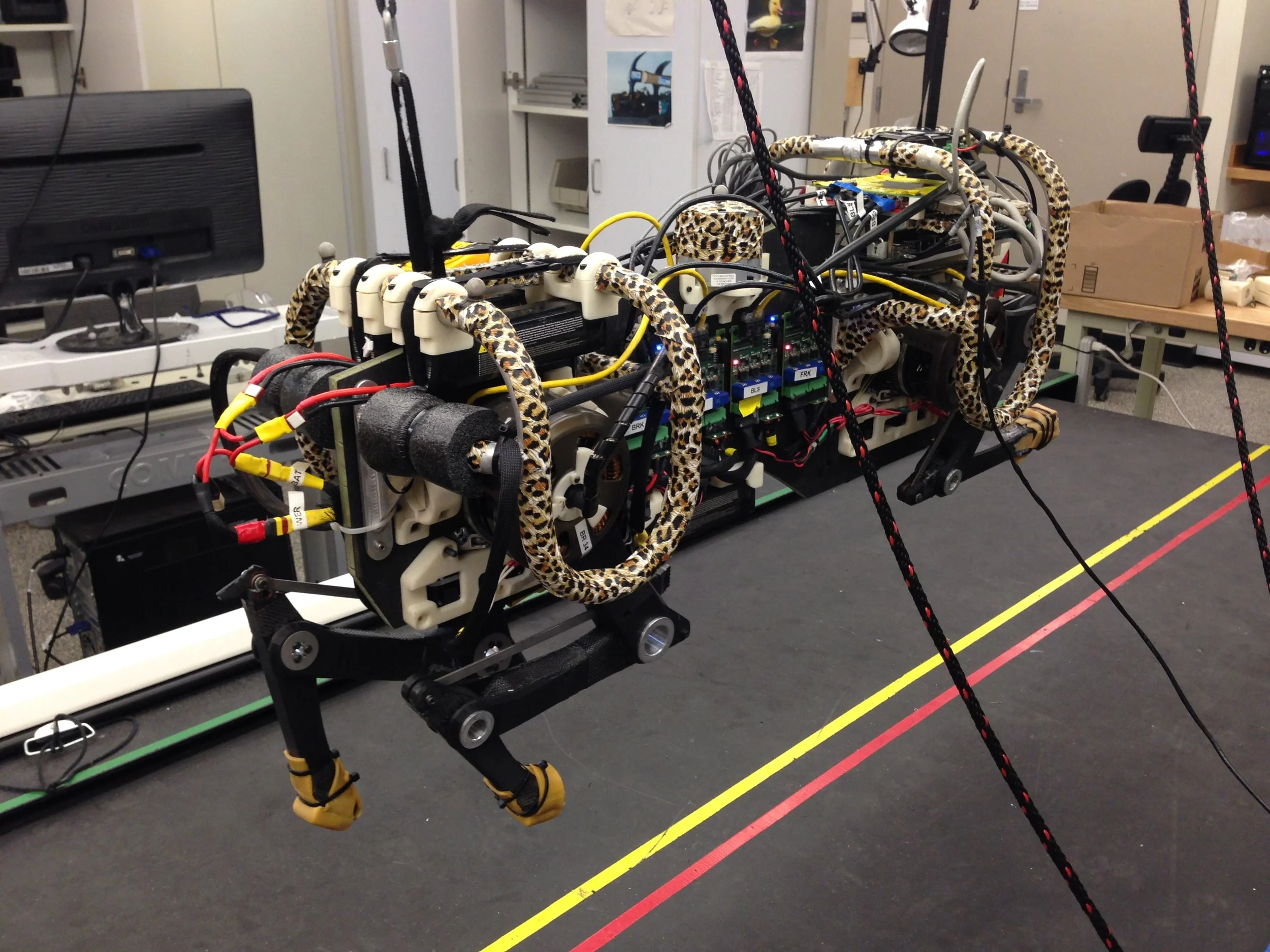




I worked in the Biomimetic Robotics Laboratory for two years as an undergraduate researcher. During this time I researched Cheetah locomotion and designed a new version of the mechanical spine for the MIT Cheetah robot. I also created a simple tail for experimentation and to research the possibilities of tails in robotics for stability and maneuverability.
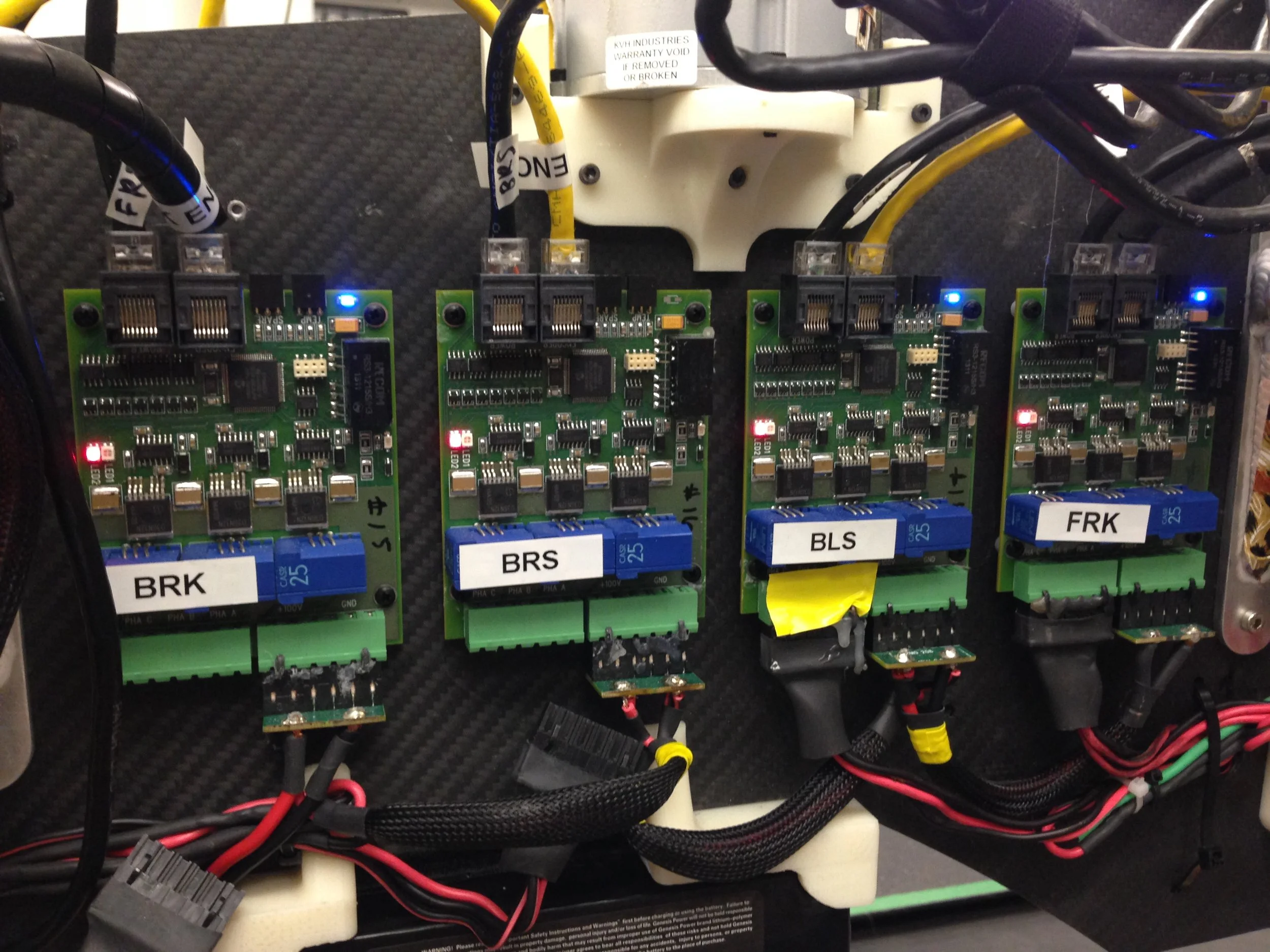
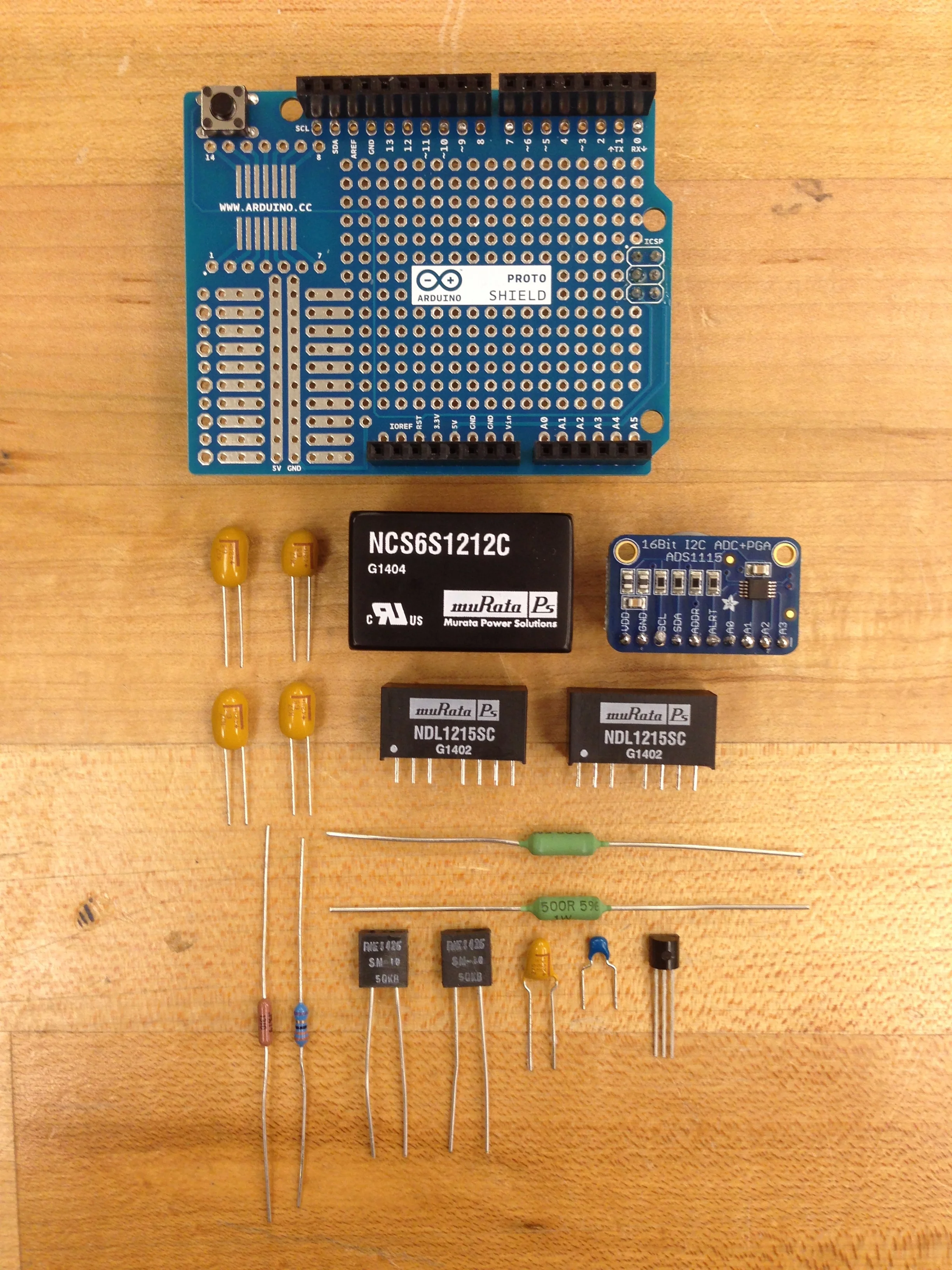
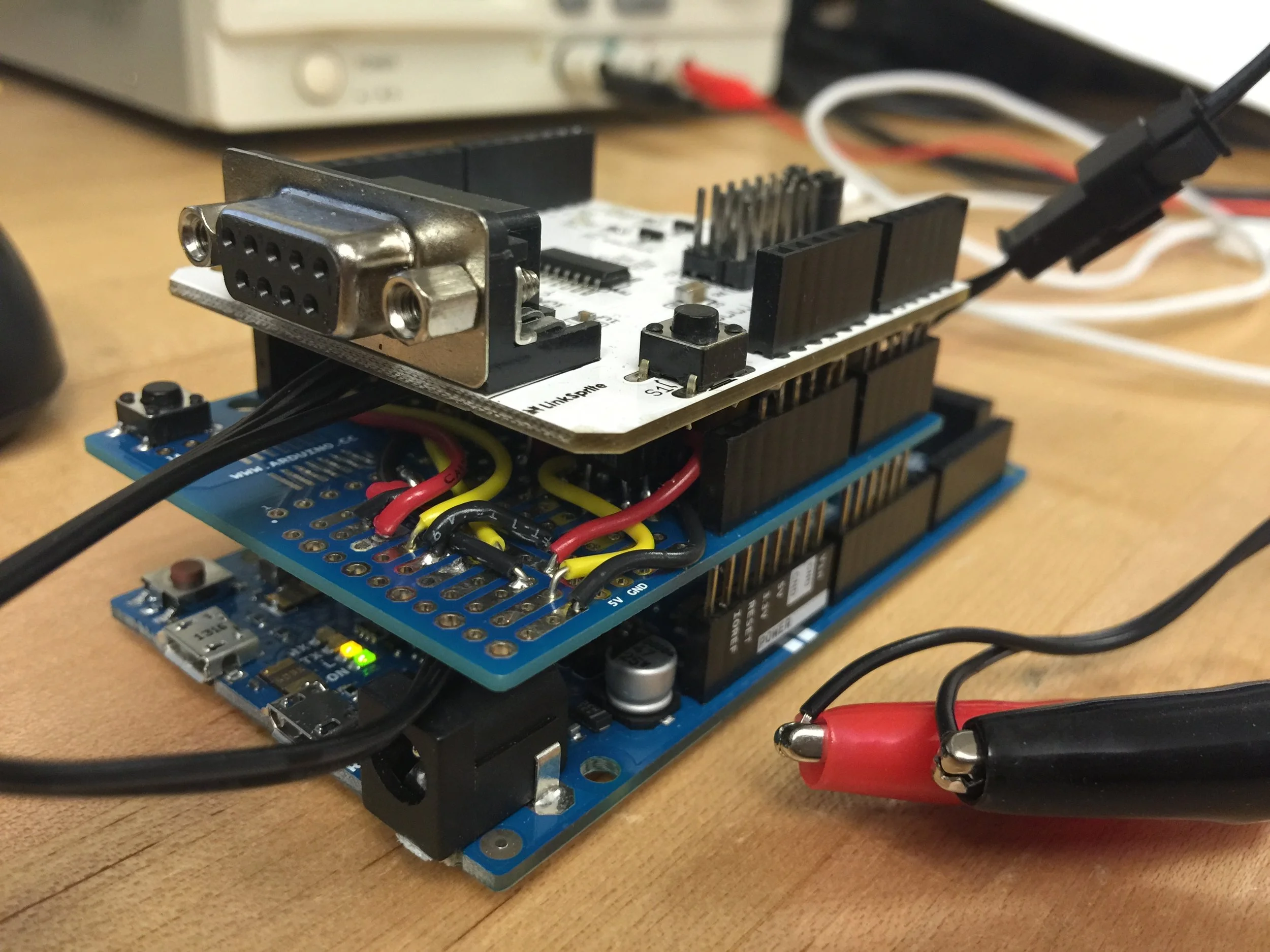
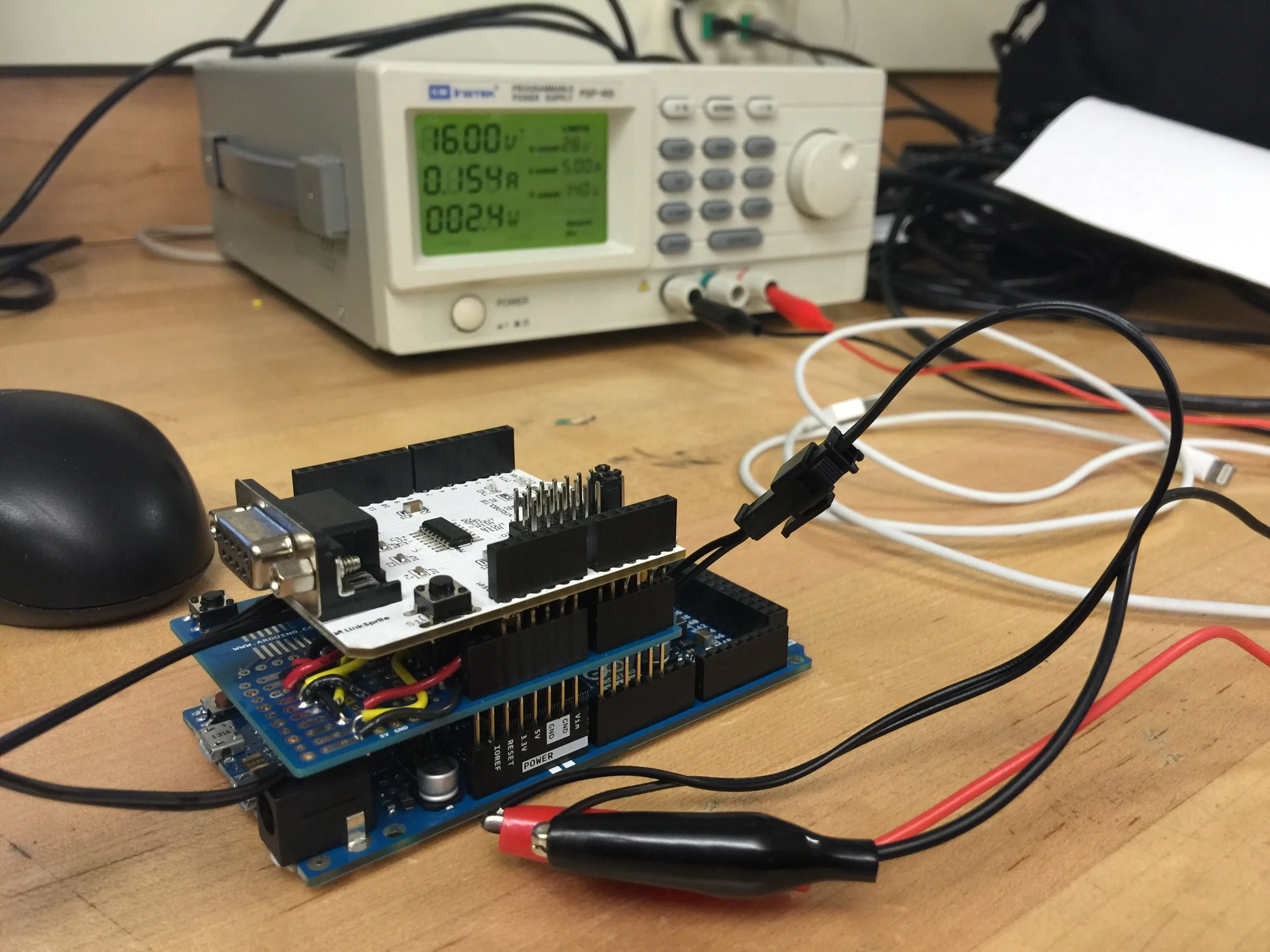
As a research assistant, I designed and built a custom module for monitoring real-time power draw from the onboard battery system and used this system when conducting experiments related to the robots energy efficiency and locomotive ability in various scenarios.
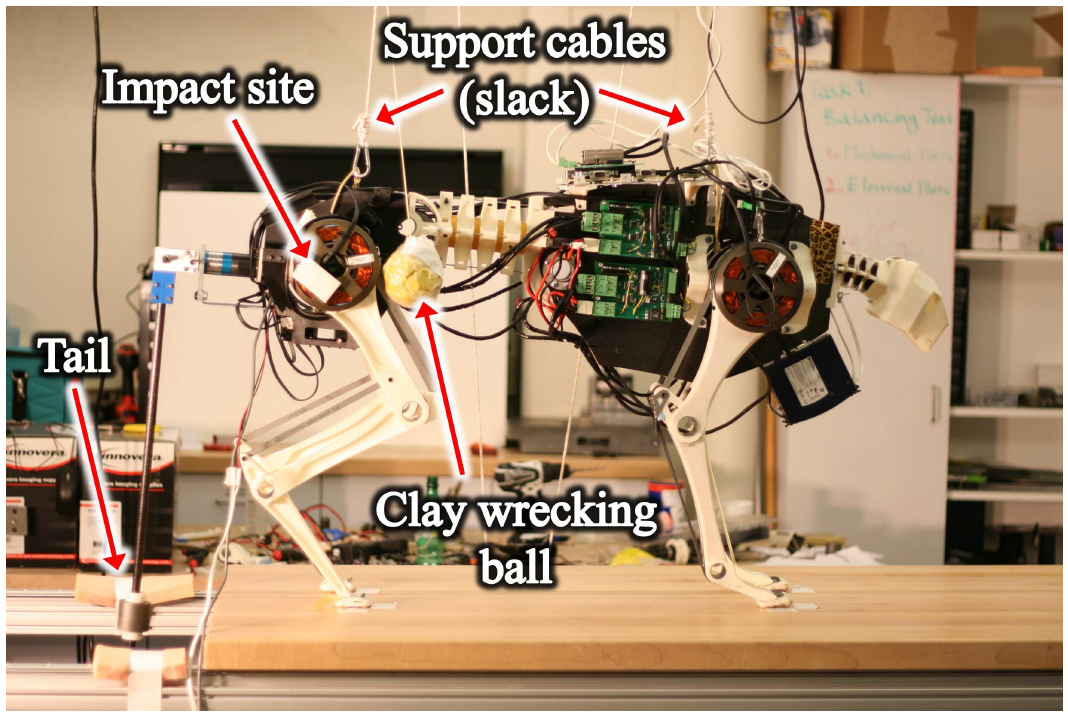
I authored this paper (screenshots shown below) regarding the design and implementation of the actuated tail of the cheetah robot